Der Timer ist ein sehr nützliches Instrument in der hardwarenahen Programmierung und eignet sich besonders gut für zeitbasierte Vorgänge, wie zum Beispiel:
- Delay (Programmverzögerung) um bestimmte Anzahl an Sekunden
- regelmäßig ADC triggern
- DC-Motor drehzahlgesteuert zu betreiben
Theorie
Abschnitt betitelt „Theorie“Der ATmega 328p hat 3 verschiedene Timer:
- TC0: 8-bit
- TC1: 16-bit
- TC2: 8-bit; async
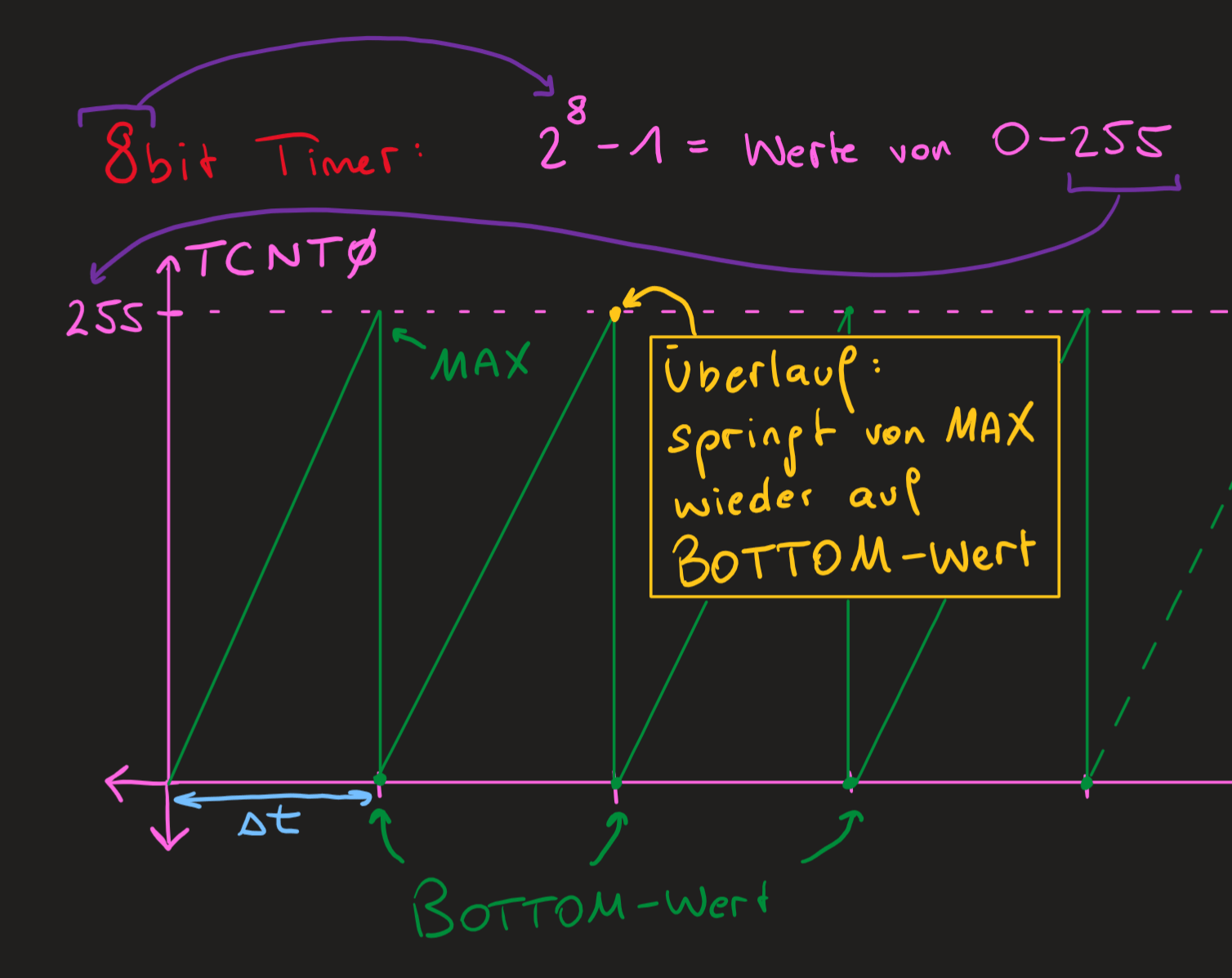
Jeder Timer verfügt über ein eigenes Zählregister TCNTn, welches einmal pro Systemtakt hoch zählt. Wenn das Zählregister den TOP-Wert bzw. den OCRnx-Wert (CTC Mode) erreicht hat, passiert ein Überlauf. Das ist der Fachausdruck für den Prozess, bei welchem TCNTn wieder auf den BOTTOM-Wert gesetzt wird.
Der Prozess des Überlaufs ist periodisch und wird hier grafisch dargestellt:
Prescaler
Abschnitt betitelt „Prescaler“Der Prescaler verlangsamt den Zähltakt. Auf Hardware-Ebene ist der Prescaler nämlich ein Bauteil vorm Timer, welcher den Systemtakt als Input bekommt und den manipulierten neuen Takt an den Timer weitergibt. Standardmäßig ist der Prescaler nicht gesetzt, was bedeutet, dass der Timer gar keinen Takt bekommt und somit gestoppt ist.
| Prescaler | neuer Takt | neue Periodendauer | ||
|---|---|---|---|---|
| 1 | 16MHz | 0.0000625ms | 0.016ms | 4.096ms |
| 8 | 2MHz | 0.0005ms | 0.1275ms | 32.76ms |
| 64 | 250kHz | 0.004ms | 1.02ms | 262.14ms |
| 256 | 62.5kHz | 0.016ms | 4.08ms | 1048.5ms |
| 1024 | 15.625kHz | 0.064ms | 16.32ms | 4194.24ms |
Modes of Operation
Abschnitt betitelt „Modes of Operation“Dabei hat jeder Timer 3 verschiedene Modi, welche in der Tabelle kurz erklärt werden:
| Normal Mode | CTC Mode | PWM Mode |
|---|---|---|
Im normalen Modus zählt der Timer von BOTTOM bis TOP und wird bei TOP wieder auf BOTTOM gesetzt. Es gibt die Möglichkeit den Timer mit einem bestimmten Wert vorzuladen - also quasi den BOTTOM-Wert zu erhöhen -, indem man einfach TCNTn immer direkt nach dem Überlauf setzt, weshalb man die Zeitspanne bis zum Überlauf verringert. | Bei der Clear Timer on Compare Match setzt man anfangs einmal den OCRnA- bzw. den OCRnB-Wert. Erreicht der Timer (also TCNTn) diesen Wert, wird er geleert, was bedeutet, dass TCNTn wieder auf 0 gesetzt wird. Die Timer unterstützen dabei zwei unabhängige Output Compare Register (OCRnA und OCRnB). | Mithilfe der Pulse Width Modulation kann man die Spannung auf einem bestimmten PIN variable verändern. Somit lässt sich z. B. ein DC-Motor steuern, welcher sich umso schneller dreht, je mehr Spannung er bekommt. |
Normal Mode
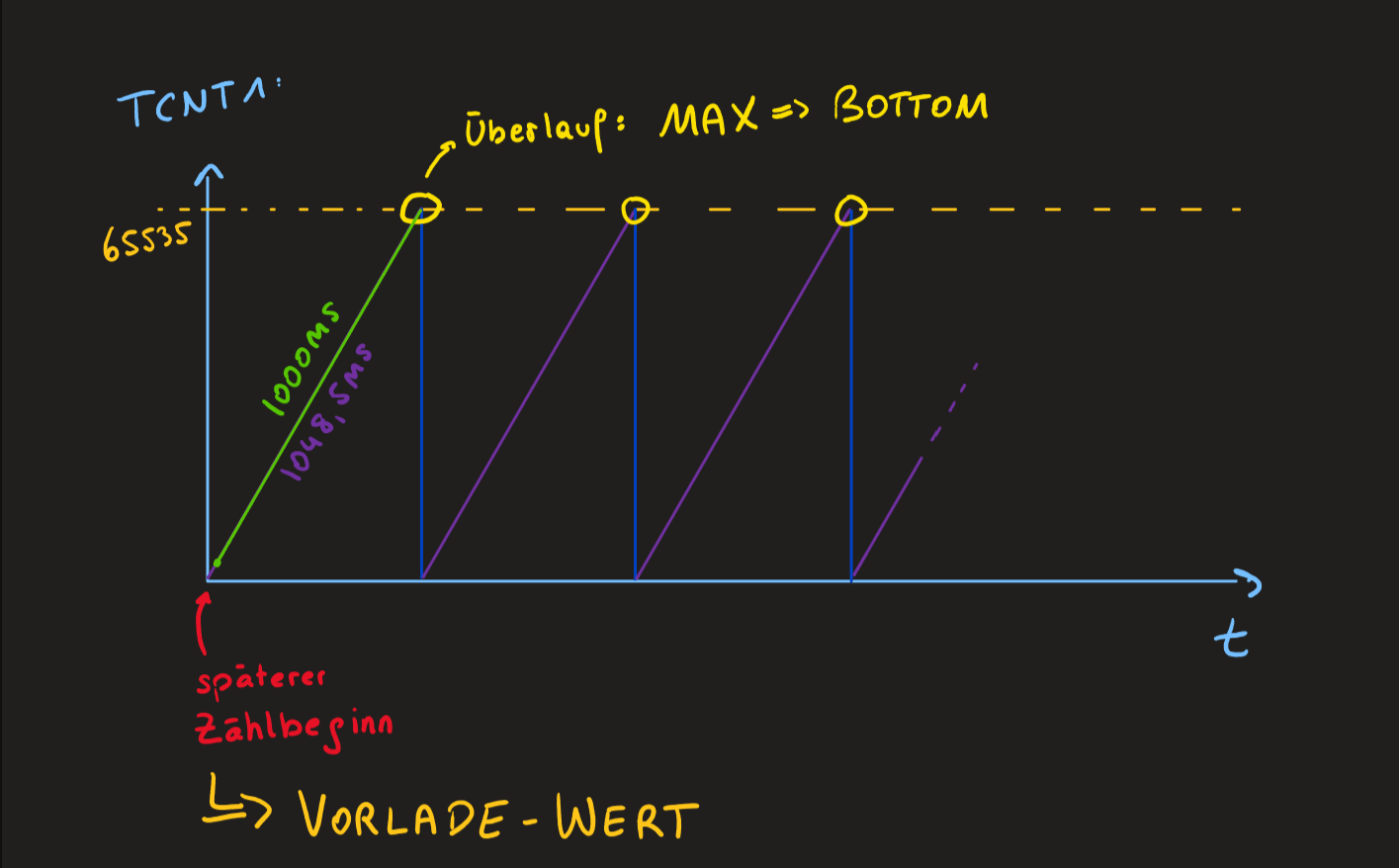
Abschnitt betitelt „Normal Mode“Um einen bestimmten Programmcode in gewünschten Zeitabständen auszulösen, können wir also nun einen Timer verwenden, welcher konstant hoch zählt und überläuft. Da die Zeitspanne bis zum Überlauf allerdings nicht immer exakt der gewünschten Zeitspanne entsprechen wird, müssen wir den BOTTOM-Wert / Vorladewert so verändern (also erhöhen), dass die zeitliche Differenz zwischen dem Vorladewert und dem TOP-Wert genau der gewünschten Zeitspanne entspricht. Wie man dies programmtechnisch umsetzt, wird unten beim Code erklärt. Um Ihnen die schwierigen Berechnungen zu ersparen, gibt es hier eine einfache Formel zur Berechnung des Vorladewertes:
Zur Visualisierung, was wir eigentlich gerade gemacht haben, eignet sich dieses Bild:
CTC - Clear Timer on Compare Match
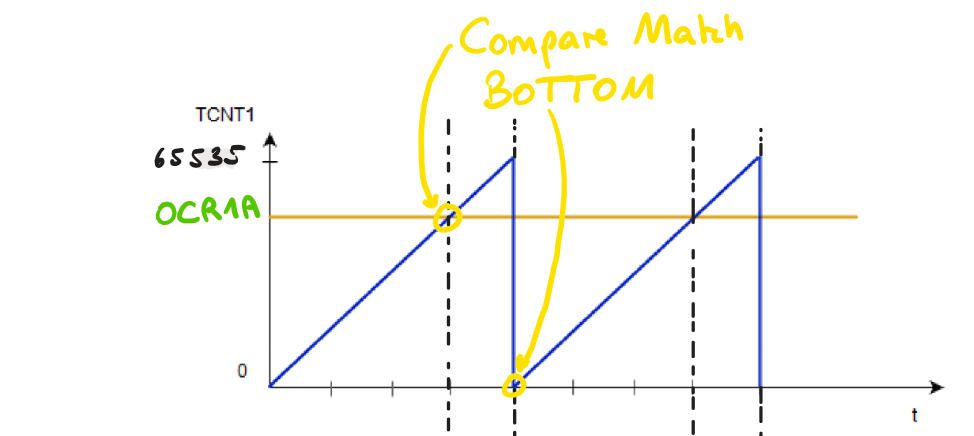
Abschnitt betitelt „CTC - Clear Timer on Compare Match“Der Clear Timer on Compare Match Mode erleichtert uns die exakte regelmäßige Ausführung eines Programmcodes. Man setzt anfangs einmalig den OCRnx-Wert (Output Compare Register) als Obergrenze. Man kann sich das so vorstellen, als würde man den TOP-Wert senken. Somit ist der CTC Mode das Gegenteil des Vorladens, erfüllt allerdings den gleichen Zweck.
Die Formel zur Berechnung des Output Compare Register-Wertes ist ziemlich ähnlich. Beachten Sie dabei wieder die gleichen Definitionsmengen wie bei obiger Formel!
PWM - Pulse Width Modulation
Abschnitt betitelt „PWM - Pulse Width Modulation“Mithilfe des PWM Modes kann man an bestimmten PINs eine bestimmte Spannung zwischen 0V und 5V anlegen. Durch ständiges, in bestimmten Intervallen auftretendes Ein- und Ausschalten der Spannung, stellt sich diese nach kurzer Zeit automatisch auf den Mittelwert der zeitlich auftretenden Spannungen ein.
Diese Vorgang passiert in Realität so schnell, dass man das ständigen Ein- und Ausschalten nicht mitbekommt. Hier ist der Prozess dargestellt:
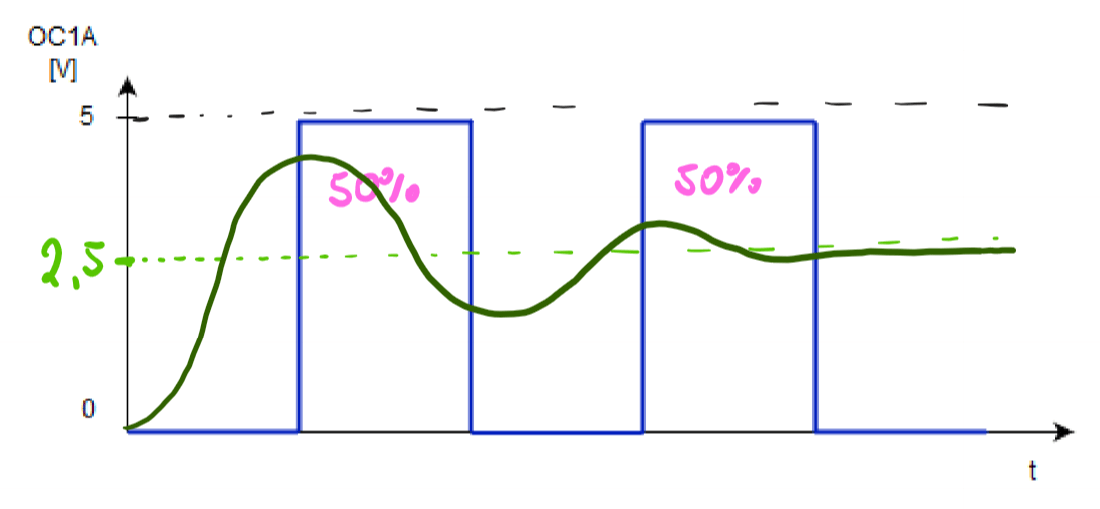
Der PWM Mode ermöglicht uns also das exakte Einstellen der Spannung bei Laufzeit.
Duty Cycle
Abschnitt betitelt „Duty Cycle“Eventuell ist Ihnen aufgefallen, dass im obigen Bild
Konfigurieren kann man den Duty Cycle mittels dem OCRnx Register. Dieses bestimmt - genau wie beim CTC Mode - den Vergleichswert (Output Compare Register).
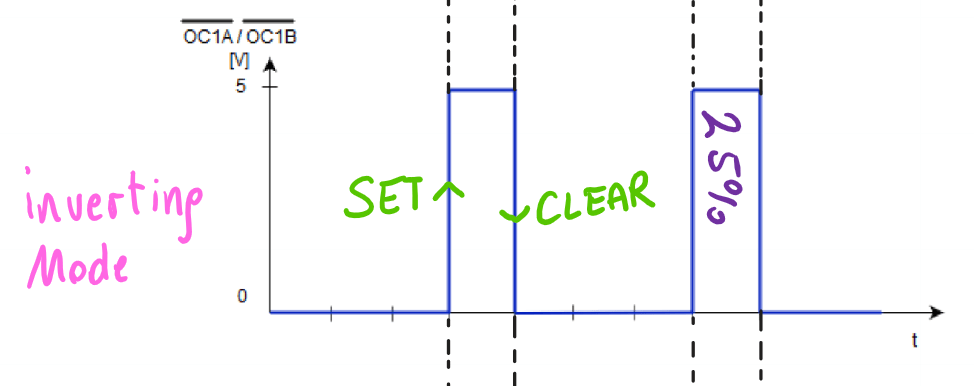
Der PWM Mode kann invertiert oder nicht invertiert betrieben werden:
Invertierter Modus
Abschnitt betitelt „Invertierter Modus“Beim invertierten Modus wird beim Erreichen des Vergleichswertes (TCNTn OCRnx) die Spannung auf high gesetzt und beim Überlauf auf low.
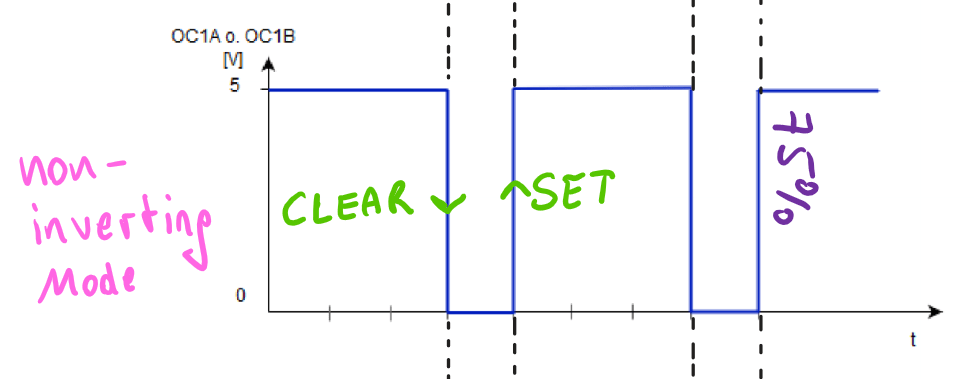
Nicht Invertierter Modus
Abschnitt betitelt „Nicht Invertierter Modus“Beim nicht invertierten Modus ist es genau umgekehrt. Beim Erreichen des Vergleichswertes (TCNTn OCRnx) wird die Spannung auf low gesetzt und beim Überlauf auf high.
Interrupts
Abschnitt betitelt „Interrupts“Übersichtliche Tabelle für die wichtigsten Konfigurationen (alle Konfiguration finden Sie hier: TC0: Table 14-8, TC1: Table 15-5, TC2: Table 17-8):
| Normal Mode | CTC Mode | Fast PWM Mode | Phase Correct PWM Mode | |
|---|---|---|---|---|
| TC0 | WGM00 == 0WGM01 == 0WGM02 == 0 | WGM00 == 0WGM01 == 1WGM02 == 0 | WGM00 == 1WGM01 == 1WGM02 == 0 | WGM00 == 1WGM01 == 0WGM02 == 0 |
| TC1 | WGM10 == 0WGM11 == 0WGM12 == 0WGM13 == 0 | WGM10 == 0WGM11 == 0WGM12 == 1WGM13 == 0 | WGM10 == 1WGM11 == 0WGM12 == 1WGM13 == 0 | WGM10 == 1WGM11 == 0WGM12 == 0WGM13 == 0 |
| TC2 | WGM20 == 0WGM21 == 0WGM22 == 0 | WGM20 == 0WGM21 == 1WGM22 == 0 | WGM20 == 1WGM21 == 1WGM22 == 0 | WGM20 == 1WGM21 == 0WGM22 == 0 |
Normal Mode
Abschnitt betitelt „Normal Mode“Für den normalen Modus beim Timer können folgende Konfigurationen getroffen werden:
-
WGMn0,WGMn1undWGMn2(undWGM13) auf 0 setzen (siehe Table 14-8, Table 15-5 oder Table 17-8)// Timer Modus auf Normal Mode setzenTCCRnA &= ~((1<<WGMn0) | (1<<WGMn1));TCCRnB &= ~((1<<WGMn2)); -
CSn0,CSn1undCSn2einstellen (siehe Table 14-9, Table 15-6 oder Table 17-9)// Prescaler einstellen - Beispiel 1024TCCRnB |= (1<<CSn0) | (1<<CSn2);TCCRnB &= ~(1<<CSn1);Nutzen Sie diese Tabelle, um herauszufinden, welcher Prescaler Wert in Ihrem Program am meisten Sinn macht.
TCNTn vorladen
Abschnitt betitelt „TCNTn vorladen“Um diese Aufgabe zu lösen, verwenden wir die Formel, um uns den Vorladewert von
#define F_CPU 16000000
#include <avr/io.h>
int main(void){ // Timer Modus auf Normal setzen (optional) TCCR1A &= ~((1<<WGM10) | (1<<WGM11)); TCCR1B &= ~((1<<WGM12) | (1<<WGM13));
// Zählregister vorladen TCNT1 = 1536;
sei();
while (1);}
// ISR wird jeden Überlauf getriggert - alle 4ms in diesem FallISR(TIMER1_OVF_vect) { // Code
// Zählregister vorladen TCNT1 = 1536;}CTC - Clear Timer on Compare Match
Abschnitt betitelt „CTC - Clear Timer on Compare Match“Für den CTC Modus beim Timer müssen/können folgende Konfigurationen getroffen werden:
-
WGMnxrichtig setzen (TC0 / TC2:WGMn1; TC1:WGM12(undWGM13))
(siehe Table 14-8, Table 15-5 oder Table 17-8) -
OCIEnxauf 1 setzen (siehe 14.9.6, 15.11.8 oder 17.11.6)// Interrupts aktivieren - Beispiel Compare Match ATIMSKn |= (1<<OCIEnA); -
CSn0,CSn1undCSn2einstellen (siehe Table 14-9, Table 15-6 oder Table 17-9)// Prescaler einstellen - Beispiel 256TCCRnB |= (1<<CSn2);TCCRnB &= ~((1<<CSn0) | (1<<CSn1));Nutzen Sie diese Tabelle, um herauszufinden, welcher Prescaler Wert in Ihrem Program am meisten Sinn macht.
Um diese Aufgabe zu lösen, verwenden wir die Formel, um uns den Vorladewert von
#define F_CPU 16000000
#include <avr/io.h>
int main(void){ // Timer Modus auf CTC setzen TCCR1A &= ~((1<<WGM10) | (1<<WGM11)); TCCR1B |= (1<<WGM12); TCCR1B &= ~(1<<WGM13);
// Output Compare Register richtig einstellen OCR1A = 64000;
// Output Compare Register Interrupt aktivieren TIMSK1 |= (1<<OCIE1A);
sei();
while (1);}
// ISR wird bei jedem Compare Match getriggert - alle 4ms in diesem FallISR(TIMER1_COMPA_vect) { // Code}PWM - Puls Width Modulation
Abschnitt betitelt „PWM - Puls Width Modulation“Für den PWM Modus beim Timer müssen/können folgende Konfigurationen getroffen werden:
-
WGMnxrichtig setzen (siehe Table 14-8, Table 15-5 oder Table 17-8) -
invertierenden / nicht-invertierenden Modus einstellen
-
COMnA0undCOMnA1(siehe Table 14-3 und 14-4, Table 15-3 und 15-4 oder Table 17-3 und 17-4) -
COMnB0undCOMnB1(siehe Table 14-6 und 14-7, Table 15-3 und 15-4 oder Table 17-6 und 17-7)
-
-
CSn0,CSn1undCSn2einstellen (siehe Table 14-9, Table 15-6 oder Table 17-9)// Prescaler einstellen - Beispiel 64TCCRnB |= (1<<CSn0) | (1<<CSn1);TCCRnB &= ~(1<<CSn2);Nutzen Sie diese Tabelle, um herauszufinden, welcher Prescaler Wert in Ihrem Program am meisten Sinn macht.
Um diese Aufgabe zu lösen, verwenden wir die Formel, um uns den Vorladewert von
#define F_CPU 16000000
#include <avr/io.h>#include <util/delay.h>#include <avr/interrupt.h>
int main(void){ // PB1 als Ausgang konfigurieren DDRB |= (1<<DDB1);
// WGM10 und WGM12: Fast PWM; 8-bit aktivieren (MAX -> 255) TCCR1A |= (1<<WGM10); TCCR1B |= (1<<WGM12);
// CS12: 256er Prescaler setzen => PWM mit 244,1 Hz TCCR1B |= (1<<CS12);
// non-inverting Mode einstellen TCCR1A |= (1<<COM1A1);
// REFS0: Aufgrund der Beschaltung des ADCs. // A3: Analoges Signal an PC3 => MUX0 | MUX1 ADMUX |= (1<<REFS0) | (1<<MUX0) | (1<<MUX1);
// ADEN => Enables ADC // ADPSx => Division Factor to get between 50kHz and 200kHz with our 60MHz Elegoo. ADCSRA |= (1<<ADEN) | (1<<ADPS0) | (1<<ADPS1) | (1<<ADPS2);
ADCSRA |= (1<<ADIE);
// ADSC => Start Conversion ADCSRA |= (1<<ADSC);
sei();
/* Replace with your application code */ while (1) { //OCR1A = 65; // Pulsweite DC von ca. 25% //_delay_ms(2000); //OCR1A = 123; // Pulsweite DC von ca. 50% //_delay_ms(2000); //OCR1A = 255; // Pulsweite DC von ca. 100% //_delay_ms(2000); }}
ISR(ADC_vect) { OCR1A = ADCW / (1023 / 255);
// ADSC => Start Conversion ADCSRA |= (1<<ADSC);}Interrupts
Abschnitt betitelt „Interrupts“Timer Counter n Überlauf:
ISR(TIMERn_OVF_vect) {
}Timer Counter n Compare Match x:
// CTC ModeISR(TIMERn_COMPx_vect) {
}